 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQwen-VLA: Unifying Vision-Language-Action Modeling across Tasks, Environments, and Robot Embodiments
May 28, 2026Embodied intelligence is often studied through specialized models for individual tasks such as manipulation or navigation, resulting in fragmented capabilities and limited generalization across tasks, environments, and robot embodiments. In this work, we study whether heterogeneous embodied decision-making problems can be unified within a single vision-language-action model. We present Qwen-VLA, a unified embodied foundation model that extends Qwen's vision-language modeling stack from perception, understanding, and reasoning to continuous action and trajectory generation through a DiT-based action decoder. Qwen-VLA is trained with a large-scale joint pretraining recipe over diverse data sources, including robotics manipulation trajectories, human egocentric demonstrations, synthetic simulation data, vision-and-language navigation data, trajectory-centric supervision, and auxiliary vision-language data. To support multiple robot platforms, we introduce embodiment-aware prompt conditioning, where robot-specific textual descriptions specify the current embodiment and control convention. We further cast manipulation, navigation, and trajectory prediction into a unified action-and-trajectory prediction framework, enabling transferable visual grounding, spatial reasoning, and continuous action generation across robot morphologies, task families, and environments. Experiments on manipulation, navigation, and trajectory-centric benchmarks show consistent multi-task performance and out-of-distribution generalization under variations in scene layout, background, lighting, object configuration, and robot embodiment. Qwen-VLA-Instruct achieves 97.9% on LIBERO, 73.7% on Simpler-WidowX, 86.1%/87.2% on RoboTwin-Easy/Hard, 69.0% OSR on R2R, 59.6% SR on RxR, 76.9% average OOD success in real-world ALOHA experiments, and 26.6% zero-shot success on DOMINO dynamic manipulation.
FineVLA: Fine-Grained Instruction Alignment for Steerable Vision-Language-Action Policies
May 26, 2026Vision-Language-Action (VLA) models are increasingly expected to not only complete robot tasks, but also follow human instructions about how those tasks should be executed. However, existing robot datasets usually pair trajectories with coarse goal-level language, leaving execution-critical details such as active arm, approach direction, and contact region unspecified. This limits steerable policy learning and robotic video understanding. We introduce FineVLA, an open framework for action-aligned fine-grained VLA supervision. The framework includes: (1) a data construction tool that unifies 972,247 trajectories across 85K tasks from 10 open-source robot datasets and builds FineVLA-Data, a human-verified dataset of 47,159 fine-grained trajectories; (2) a held-out benchmark with 500 videos, 10,816 atomic facts, and 1,030 VQA questions; (3) a robotics-specialized VLM annotator for scalable fine-grained annotation; and (4) a steerable VLA policy trained with controlled mixtures of fine-grained and raw goal-level instructions. Our experiments yield three findings. First, fine-grained supervision does not sacrifice goal-level success: FG-only improves over Raw-only by +1.4 to +8.1 success-rate points across settings. Second, fine-grained and raw instructions are complementary, following a consistent inverted-U trend peaking at FG:Raw = 1:2 to 1:1. The best mixed setting reaches 86.8%/82.5% in RoboTwin simulation and 62.7/100 in real-world dual-arm manipulation (vs. 49.9 Raw-only). Third, fine-grained supervision improves steerable control: the largest real-world gains appear on pose (+23), color (+18), and approach direction (+18)--factors where goal-level instructions provide no guidance. Overall, fine-grained language should augment goal-level instructions: specifying how to execute alongside what to achieve. Project page: https://finevla.xlang.ai/
Security in the Fine-Tuning Lifecycle of Large Language Models: Threats, Defenses,Evaluation, and Future Directions
May 24, 2026Background: Fine-tuning is central to adapting pre-trained Large Language Models (LLMs) to downstream tasks, but its reliance on training data, parameter updates, and reusable components opens entry points for attackers. Threats have evolved from data poisoning and weight tampering to agent manipulation and interface exploitation, yet existing reviews lack a unified framework spanning the full fine-tuning lifecycle. Objective: This paper presents a systematic survey of LLM fine-tuning security and establishes a lifecycle-based framework for comparing attacks and defenses, complemented by unified empirical evaluation. Methods: We divide attack and defense mechanisms into three phases by intervention timing: pre-tuning, during-tuning, and post-tuning. Within each phase, strategies are reviewed and contrasted to expose their evolution and limitations. Representative methods are then evaluated under a unified model, hardware, and protocol setup, with cross-phase experiments pairing attacks and defenses from different phases. Results: Attack effectiveness is highly model-dependent and non-monotonic with scale: weight-editing attacks effective on earlier models lose impact on modern open-source LLMs; cross-lingual backdoor transfer, reported as near-perfect at larger scales, fails entirely on tested 1B-4B models; and purely benign samples can compromise safety alignment in instruction-tuned models. Single-phase defenses rarely generalize across phases, and defense effectiveness depends jointly on model architecture and alignment state. Conclusion: We identify key open problems (configuration-robust defense, cross-phase defense composition, and embedding-space attacks beyond behavioral assumptions) and propose concrete future research directions.
Contextual Experience Replay for Self-Improvement of Language Agents
Jun 07, 2025



Large language model (LLM) agents have been applied to sequential decision-making tasks such as web navigation, but without any environment-specific experiences, they often fail in these complex tasks. Moreover, current LLM agents are not designed to continually learn from past experiences during inference time, which could be crucial for them to gain these environment-specific experiences. To address this, we propose Contextual Experience Replay (CER), a training-free framework to enable efficient self-improvement for language agents in their context window. Specifically, CER accumulates and synthesizes past experiences into a dynamic memory buffer. These experiences encompass environment dynamics and common decision-making patterns, allowing the agents to retrieve and augment themselves with relevant knowledge in new tasks, enhancing their adaptability in complex environments. We evaluate CER on the challenging WebArena and VisualWebArena benchmarks. On VisualWebArena, CER achieves a competitive performance of 31.9%. On WebArena, CER also gets a competitive average success rate of 36.7%, relatively improving the success rate of the GPT-4o agent baseline by 51.0%. We also conduct a comprehensive analysis on it to prove its efficiency, validity and understand it better.
CharXiv: Charting Gaps in Realistic Chart Understanding in Multimodal LLMs
Jun 26, 2024



Chart understanding plays a pivotal role when applying Multimodal Large Language Models (MLLMs) to real-world tasks such as analyzing scientific papers or financial reports. However, existing datasets often focus on oversimplified and homogeneous charts with template-based questions, leading to an over-optimistic measure of progress. We demonstrate that although open-source models can appear to outperform strong proprietary models on these benchmarks, a simple stress test with slightly different charts or questions can deteriorate performance by up to 34.5%. In this work, we propose CharXiv, a comprehensive evaluation suite involving 2,323 natural, challenging, and diverse charts from arXiv papers. CharXiv includes two types of questions: 1) descriptive questions about examining basic chart elements and 2) reasoning questions that require synthesizing information across complex visual elements in the chart. To ensure quality, all charts and questions are handpicked, curated, and verified by human experts. Our results reveal a substantial, previously underestimated gap between the reasoning skills of the strongest proprietary model (i.e., GPT-4o), which achieves 47.1% accuracy, and the strongest open-source model (i.e., InternVL Chat V1.5), which achieves 29.2%. All models lag far behind human performance of 80.5%, underscoring weaknesses in the chart understanding capabilities of existing MLLMs. We hope CharXiv facilitates future research on MLLM chart understanding by providing a more realistic and faithful measure of progress. Project page and leaderboard: https://charxiv.github.io/
OSWorld: Benchmarking Multimodal Agents for Open-Ended Tasks in Real Computer Environments
Apr 11, 2024



Autonomous agents that accomplish complex computer tasks with minimal human interventions have the potential to transform human-computer interaction, significantly enhancing accessibility and productivity. However, existing benchmarks either lack an interactive environment or are limited to environments specific to certain applications or domains, failing to reflect the diverse and complex nature of real-world computer use, thereby limiting the scope of tasks and agent scalability. To address this issue, we introduce OSWorld, the first-of-its-kind scalable, real computer environment for multimodal agents, supporting task setup, execution-based evaluation, and interactive learning across various operating systems such as Ubuntu, Windows, and macOS. OSWorld can serve as a unified, integrated computer environment for assessing open-ended computer tasks that involve arbitrary applications. Building upon OSWorld, we create a benchmark of 369 computer tasks involving real web and desktop apps in open domains, OS file I/O, and workflows spanning multiple applications. Each task example is derived from real-world computer use cases and includes a detailed initial state setup configuration and a custom execution-based evaluation script for reliable, reproducible evaluation. Extensive evaluation of state-of-the-art LLM/VLM-based agents on OSWorld reveals significant deficiencies in their ability to serve as computer assistants. While humans can accomplish over 72.36% of the tasks, the best model achieves only 12.24% success, primarily struggling with GUI grounding and operational knowledge. Comprehensive analysis using OSWorld provides valuable insights for developing multimodal generalist agents that were not possible with previous benchmarks. Our code, environment, baseline models, and data are publicly available at https://os-world.github.io.
OpenAgents: An Open Platform for Language Agents in the Wild
Oct 16, 2023



Language agents show potential in being capable of utilizing natural language for varied and intricate tasks in diverse environments, particularly when built upon large language models (LLMs). Current language agent frameworks aim to facilitate the construction of proof-of-concept language agents while neglecting the non-expert user access to agents and paying little attention to application-level designs. We present OpenAgents, an open platform for using and hosting language agents in the wild of everyday life. OpenAgents includes three agents: (1) Data Agent for data analysis with Python/SQL and data tools; (2) Plugins Agent with 200+ daily API tools; (3) Web Agent for autonomous web browsing. OpenAgents enables general users to interact with agent functionalities through a web user interface optimized for swift responses and common failures while offering developers and researchers a seamless deployment experience on local setups, providing a foundation for crafting innovative language agents and facilitating real-world evaluations. We elucidate the challenges and opportunities, aspiring to set a foundation for future research and development of real-world language agents.
Lemur: Harmonizing Natural Language and Code for Language Agents
Oct 10, 2023We introduce Lemur and Lemur-Chat, openly accessible language models optimized for both natural language and coding capabilities to serve as the backbone of versatile language agents. The evolution from language chat models to functional language agents demands that models not only master human interaction, reasoning, and planning but also ensure grounding in the relevant environments. This calls for a harmonious blend of language and coding capabilities in the models. Lemur and Lemur-Chat are proposed to address this necessity, demonstrating balanced proficiencies in both domains, unlike existing open-source models that tend to specialize in either. Through meticulous pre-training using a code-intensive corpus and instruction fine-tuning on text and code data, our models achieve state-of-the-art averaged performance across diverse text and coding benchmarks among open-source models. Comprehensive experiments demonstrate Lemur's superiority over existing open-source models and its proficiency across various agent tasks involving human communication, tool usage, and interaction under fully- and partially- observable environments. The harmonization between natural and programming languages enables Lemur-Chat to significantly narrow the gap with proprietary models on agent abilities, providing key insights into developing advanced open-source agents adept at reasoning, planning, and operating seamlessly across environments. https://github.com/OpenLemur/Lemur
Text2Reward: Automated Dense Reward Function Generation for Reinforcement Learning
Sep 21, 2023



Designing reward functions is a longstanding challenge in reinforcement learning (RL); it requires specialized knowledge or domain data, leading to high costs for development. To address this, we introduce Text2Reward, a data-free framework that automates the generation of dense reward functions based on large language models (LLMs). Given a goal described in natural language, Text2Reward generates dense reward functions as an executable program grounded in a compact representation of the environment. Unlike inverse RL and recent work that uses LLMs to write sparse reward codes, Text2Reward produces interpretable, free-form dense reward codes that cover a wide range of tasks, utilize existing packages, and allow iterative refinement with human feedback. We evaluate Text2Reward on two robotic manipulation benchmarks (ManiSkill2, MetaWorld) and two locomotion environments of MuJoCo. On 13 of the 17 manipulation tasks, policies trained with generated reward codes achieve similar or better task success rates and convergence speed than expert-written reward codes. For locomotion tasks, our method learns six novel locomotion behaviors with a success rate exceeding 94%. Furthermore, we show that the policies trained in the simulator with our method can be deployed in the real world. Finally, Text2Reward further improves the policies by refining their reward functions with human feedback. Video results are available at https://text-to-reward.github.io
$\mathcal{Y}$-Tuning: An Efficient Tuning Paradigm for Large-Scale Pre-Trained Models via Label Representation Learning
Feb 20, 2022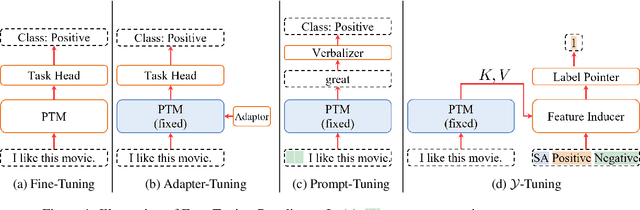
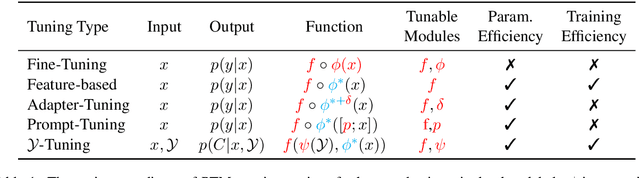
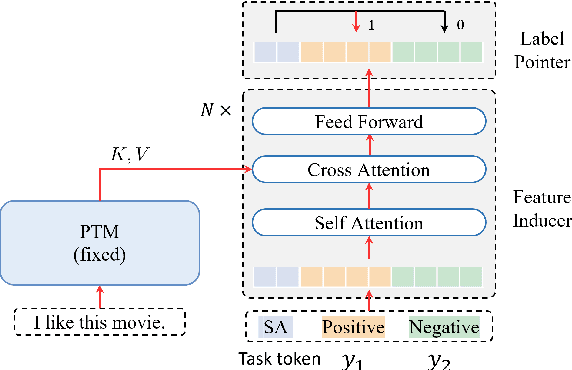
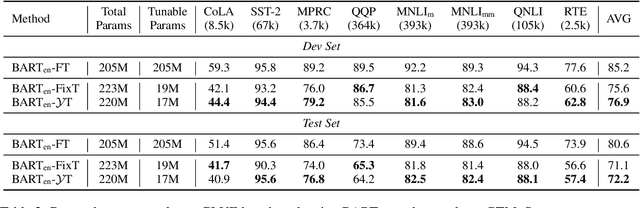
With the success of large-scale pre-trained models (PTMs), how efficiently adapting PTMs to downstream tasks has attracted tremendous attention, especially for PTMs with billions of parameters. Although some parameter-efficient tuning paradigms have been proposed to address this problem, they still require large resources to compute the gradients in the training phase. In this paper, we propose $\mathcal{Y}$-Tuning, an efficient yet effective paradigm to adapt frozen large-scale PTMs to specific downstream tasks. $\mathcal{Y}$-tuning learns dense representations for labels $\mathcal{Y}$ defined in a given task and aligns them to fixed feature representation. Without tuning the features of input text and model parameters, $\mathcal{Y}$-tuning is both parameter-efficient and training-efficient. For $\text{DeBERTa}_\text{XXL}$ with 1.6 billion parameters, $\mathcal{Y}$-tuning achieves performance more than $96\%$ of full fine-tuning on GLUE Benchmark with only $2\%$ tunable parameters and much fewer training costs.